import gymnasium as gym
import torch
import torch.nn as nn
import torch.optim as optim
from torch.distributions import Categorical
import numpy as np
import matplotlib.pyplot as plttorch.manual_seed(123)<torch._C.Generator at 0x7beff9d04030>class Policy(nn.Module):
def __init__(self, state_dim=4, hidden_dim=128, action_dim=2):
super().__init__()
self.net = nn.Sequential(
nn.Linear(state_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, action_dim)
)
def forward(self, x):
logits = self.net(x)
return Categorical(logits=logits)## REINFORCE
def compute_returns(rewards, gamma=0.9):
returns = []
G = 0.0
for r in reversed(rewards):
G = r + gamma * G
returns.insert(0, G)
returns = torch.tensor(returns, dtype=torch.float32)
# normalize: zero-mean, unit-variance baseline
returns = (returns - returns.mean()) / (returns.std() + 1e-8)
return returns
def run_episode(env, policy):
state, _ = env.reset()
log_probs, rewards = [], []
done = False
while not done:
state_t = torch.tensor(state, dtype=torch.float32)
dist = policy(state_t)
action = dist.sample()
log_probs.append(dist.log_prob(action))
state, reward, terminated, truncated, _ = env.step(action.item())
rewards.append(reward)
done = terminated or truncated
return log_probs, rewards
def reinforce_updater(optimizer, log_probs, returns):
# loss = -sum(log π(aₜ|sₜ) * Gₜ)
# negative because we want to MAXIMIZE expected return
# but optimizers MINIMIZE loss
loss = -torch.stack(log_probs).dot(returns)
optimizer.zero_grad()
loss.backward()
optimizer.step()
return loss.item()env = gym.make('CartPole-v1')
policy = Policy()
optimizer = optim.Adam(policy.parameters(), lr=1e-3)
episode_rewards = []
running_avg = []
window = 20
for episode in range(600):
log_probs, rewards = run_episode(env, policy)
returns = compute_returns(rewards)
reinforce_updater(optimizer, log_probs, returns)
total_reward = sum(rewards)
episode_rewards.append(total_reward)
avg = np.mean(episode_rewards[-window:])
running_avg.append(avg)
if episode % 50 == 0:
print(f"Episode {episode:4d} | reward {total_reward:6.1f} | {window}-ep avg {avg:6.1f}")
env.close()Episode 0 | reward 13.0 | 20-ep avg 13.0
Episode 50 | reward 12.0 | 20-ep avg 18.2
Episode 100 | reward 32.0 | 20-ep avg 35.1
Episode 150 | reward 76.0 | 20-ep avg 58.1
Episode 200 | reward 63.0 | 20-ep avg 85.9
Episode 250 | reward 105.0 | 20-ep avg 161.2
Episode 300 | reward 153.0 | 20-ep avg 198.8
Episode 350 | reward 146.0 | 20-ep avg 172.2
Episode 400 | reward 184.0 | 20-ep avg 248.4
Episode 450 | reward 162.0 | 20-ep avg 178.3
Episode 500 | reward 242.0 | 20-ep avg 280.4
Episode 550 | reward 126.0 | 20-ep avg 178.7state, _ = env.reset()
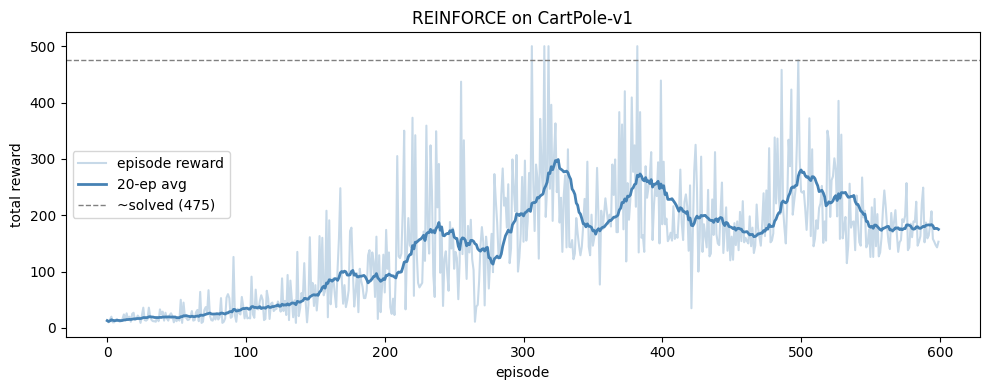
print(state)[ 0.00622006 -0.04805075 -0.04548658 -0.00264389]plt.figure(figsize=(10, 4))
plt.plot(episode_rewards, alpha=0.3, color="steelblue", label="episode reward")
plt.plot(running_avg, color="steelblue", linewidth=2, label=f"{window}-ep avg")
plt.axhline(475, color="gray", linestyle="--", linewidth=1, label="~solved (475)")
plt.xlabel("episode")
plt.ylabel("total reward")
plt.title("REINFORCE on CartPole-v1")
plt.legend()
plt.tight_layout()
plt.show()